 平台热线
平台热线



集微网消息,近日,石头科技合作伙伴大会在深圳顺利召开,本次大会以“感恩、创变、共赢”为主题,旨在对过去一年与石头科技精密合作,在产品交付方面做出重要贡献的合作伙伴进行表彰。峰岹科技荣获“交付奖”。
目前,越来越多的家庭铺设了地毯,由于扫地机器人在地毯和正常地面的清扫模式不同,因此需要对地毯进行识别。现有的智能扫地机器人,一般采用单一的悬崖感知红外传感器来识别地毯,但是红外传感器容易受材质颜色或者环境光干扰,从而导致识别准确率低。
为此,石头科技于2020年10月19日申请了一项名为“清洁机器人”的发明(申请号: WO2021169329A1),申请人为北京石头世纪科技股份有限公司。
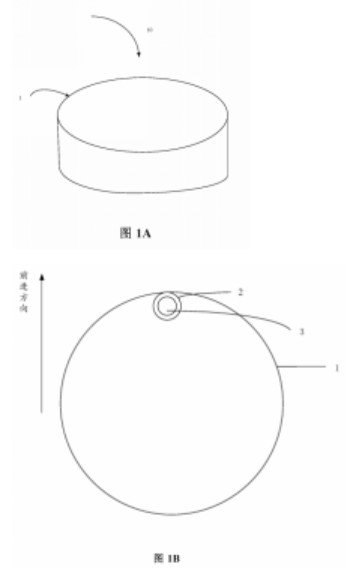
图1 清洁机器人10结构示意图
图1为清洁机器人10的结构示意图,图1A示出了该清洁机器人的俯视示意图,图1B为仰视示意图。清洁机器人主要包括:机器人主体1、控制单元、固定单元2及超声波传感器3。机器人主体形成清洁机器人的外壳,并且容纳其它部件,例如其它传感单元、驱动单元、清洁单元、能源单元和人机交互单元等,可以采用现有的任何清洁机器人所包括的各单元部件集成于本发明的机器人主体上,以完成该清洁机器人的整体运行功能。
控制单元位于机器人主体内的电路板上,其中包括处理器,处理器可以根据传感单元反馈的回波信号综合判断当前地面形态。地面形态包括正常地面和地毯表面。
固定单元位于机器人主体底盘前方,能够固定超声波传感器,方判断地面形态。具体地,固定单元包括套筒21,套筒为两边通透的中空圆柱状,中空圆柱的中心轴线垂直于地面,该结构使超声波传感器的回波信号在中空圆柱体内能够发生均匀的漫反射,进而使回波信号返回的时间固定。
套筒为机器人主体前端底部直接开设的圆筒,若超声波传感器底部穿过圆筒外露,则可在圆筒底部增设相同尺寸的中空圆筒,这种套简结构既能够节约制作成本,又能够节省安装时间。套筒面向地面的一侧表面为平面,即平行于地面,这样能够在清扫过程中能够接收更多有效的回波。

图2 清洁机器人前方底部开设圆筒立体图
图2为清洁机器人前方底部开设圆筒的立体图,超声波传感器固定于套筒内,并与控制单元电性连接。超声波传感器向地面发射超声波信号并接收地面反射的回波信号。超声波传感器还能够向控制单元发送接收的回波信号。超声波传感器的顶部设置有两个金属插头31,与控制单元电连接,进行信号传输,具体可通过接线的方式与所述控制单元电连接。
简而言之,石头科技的清洁机器人通过在前方下侧设置向下发射的超声波传感器并固定于套筒中,使正常表面与地毯表面的超声波回波波形偏差更大,从而提高清洁机器人识别地毯的准确度。
